

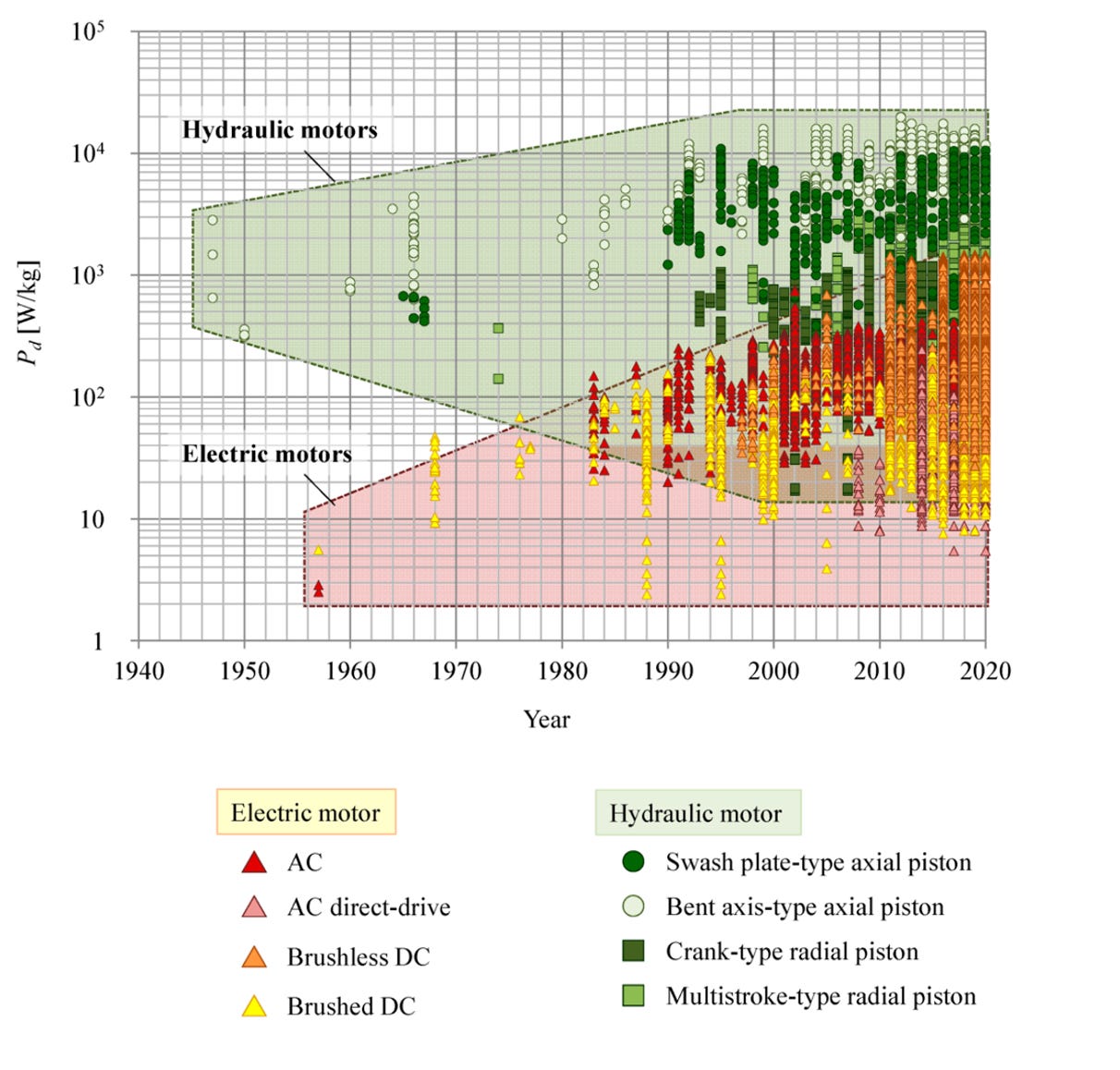
"Before the 1990s, the power density of hydraulic motors was approximately a 100 times greater than that of electric motors. Today, that gap is just a factor of 10 with advances in the strength of permanent magnets like Neodymium (Nd-Fe-B).” (1)
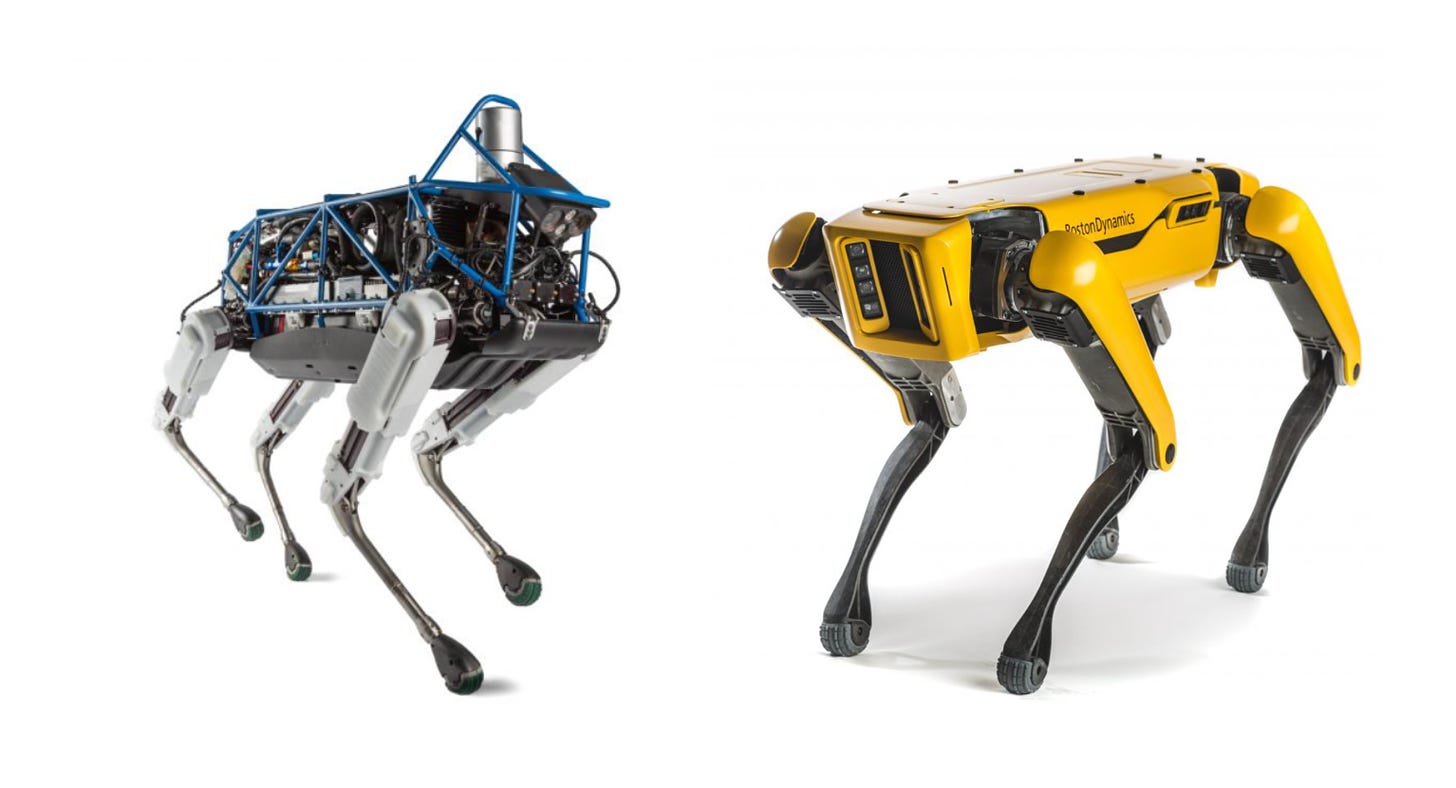
In April 2024, Boston Dynamics announced a significant transition in their Atlas robots—moving from hydraulic to electric actuators in their next generation of humanoid robots. Here’s the demonstration if you’re curious (along with clips from their previous platform).
Over the last few years, there’s been a huge surge in capital investment for humanoid robots. Tesla's Optimus, Figure AI ($675 million raised at a $2.6 billion valuation), Agility Robotics, and Astribot are prime examples of emerging companies in this sector.
As robotics trends shift towards greater efficiency and commercial viability, our team began exploring a few crucial questions.
History | The Hydraulic Atlas

Upon its debut in 2013, Atlas was originally designed as a disaster response robot in partnership with DARPA. Seven Atlas robots were built for the DARPA Robotics challenge, a prize competition where teams worked on software/hardware to accelerate the development of advanced robotics (software, control logic) specifically for requirements related to responding to natural and man-made disasters.
With the original scope established as an R&D initiative, Atlas achieved insane feats of mobile manipulation - multi-terrain movement, forward rolls, and even backflips (parkour!). Hydraulic actuators were the natural choice for the explosive and dynamic movements required. For a long time, and still today, hydraulic actuators were the only types of actuator that could generate the necessary forces for the required movements.
Because of the energy storage in a small location and the dynamics, hydraulics can push more loads than electrical.
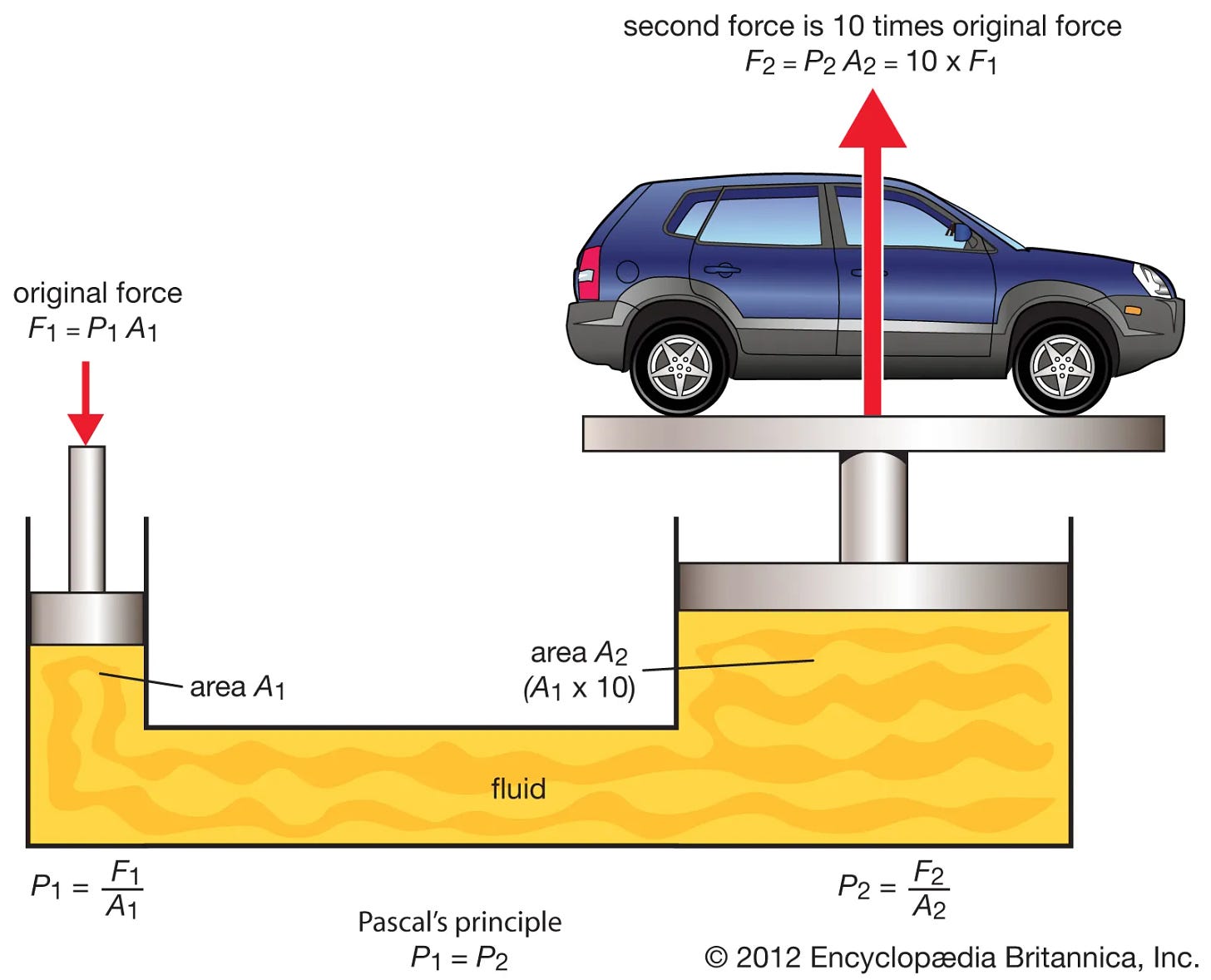
Hydraulics operate based on Pascal's Law, which states that pressure remains constant throughout a fluid. This principle allows a small force applied over a small area to generate a much larger force over a larger area. The operating pressures for these systems typically range from 1800-3000 psi. To put into perspective, a 3-inch bore at 2200 psi generates around 15,000 lbf (imagine moving a 6801 kg weight with a bore diameter that’s just slightly larger than the width of your phone!)
In a system like Atlas with 28 degrees of freedom, joint movement is achieved through a network of hydraulic pistons and fluids to move its limbs. These hydraulic pistons, arranged either axially or radially, leverage their own rotation to adjust the pressure of each piston. For even greater complexity, configurations like the Stewart Platform come into play that allow a single system to manage multiple degrees of freedom.
Each hydraulic cylinder can be produced compact and separate from other components, perfect for generating force in tight spaces like joints. The larger hydraulic power unit, which controls flow and pressure, is stored elsewhere. Perhaps it helps explain the body-centered design of the hydraulic Atlas!
These systems are complicated. We’re talking about assemblies that require multiple components like valves, tubes, and filters operating at extremely high forces. Some parts, such as relief valves, are crucial for enhancing the system's resilience to shock loads. As the number of parts increased along with mechanical complexity, systems like the hydraulic Atlas require frequent maintenance to achieve the desired performance over life. Common maintenance includes keeping the system free of air, which can slow down response times due to air's compressive nature. Other challenges include repeatability (position, speed and force) of a hydraulic cylinder, worn seals, leaks, and pressure drops are major reliability considerations for a hydraulic-based architecture.
“It is not a matter of IF hydraulics will leak, but a matter of when and by how much.”
Despite these challenges, the team managed to get Atlas to perform impressive movements with the aid of sophisticated software controls.* By precisely controlling speeds and torques at specific moments, they could execute complex motions, such as this backflip, all through the use of hydraulics/servo-hydraulics.
 | Boston dynamics, Humanoid robot, Robot")
*The mechanics of software control for robotic walking merits more than another post. This Reddit thread goes into the history of different types of walks (stable vs. dynamic), approaches from different companies, and more.
Background | Types of Actuators
When researching more into the mechanical architecture of the Atlas platform, our first question was: how do you even select actuators?
At its core, actuators are the part of the robotic system that convert stored energy into movement. These movements can be powered by mediums like air, electricity, or liquids—the corresponding actuators for each medium include pneumatic, electric, and hydraulic powered actuators. In a full system, actuators are integrated with sensors and control systems to allow for intelligent control in dynamic environments.
To select an actuator for a particular application, the core requirements boil down to answering several questions:
- Force & Torque: What are the maximum/minimum requirements? Do these requirements change under different conditions?
- Speed & Response: How quickly do the actuators need to respond to control inputs?
- Accuracy & Precision: What level of positional accuracy is required? How consistent should motion be across several cycles?
- Energy Efficiency: Is high energy efficiency required, especially if battery-powered?
- Costs: What are upfront and lifetime cost considerations for the actuator?
For example, considerations for industrial systems typically use high-rated power actuators and operate in fixed working environments, while legged robots often operate in complex environments that require fast-motion responses.
Trends | Hydraulic vs. Electric Actuators
In more recent years, the power of electric motors has become increasingly competitive with that of hydraulics. Up until the 1990s, hydraulic motors had a power density about 100 times greater than electric motors. Today, that gap has narrowed to just 10 times (1). This surge in electric motor performance is largely due to the development of stronger magnets, like Neodymium (Nd-Fe-B).
With a shrinking gap in power output, electrical motors became a more compelling option due to several inherent advantages.
Efficiency
Electric actuators have an efficiency range of 75-80%, compared to hydraulics' 40-55%. This efficiency comes from electric motors drawing current only when needed, whereas hydraulic systems must constantly maintain pressure.
Number of Components
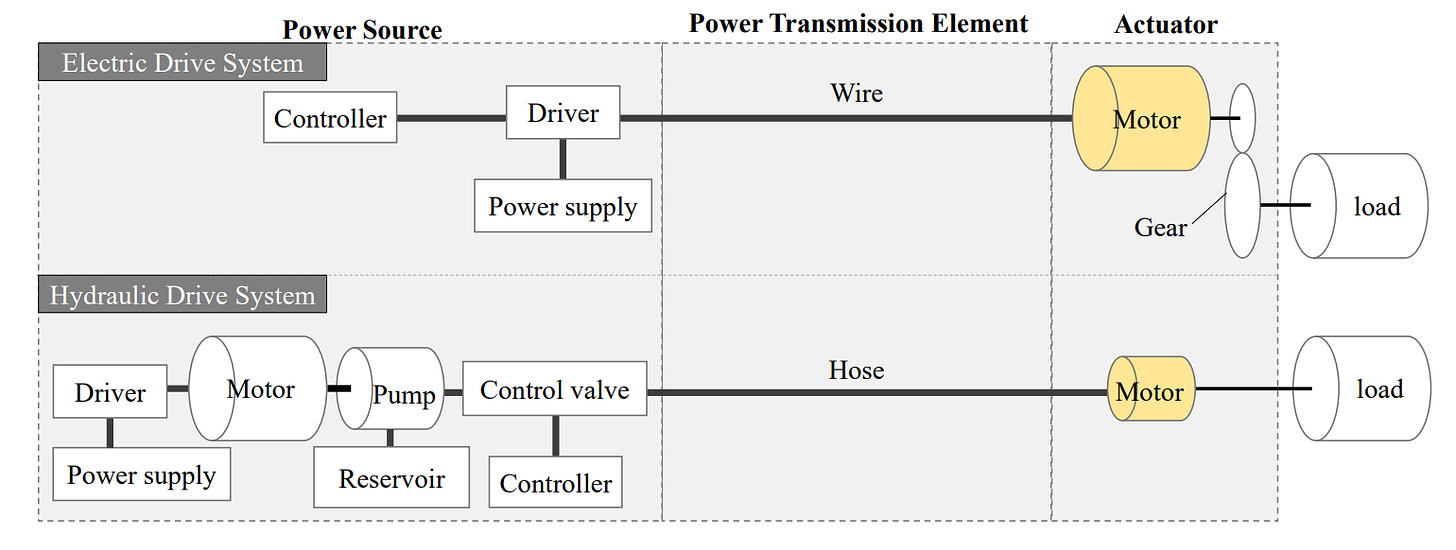
Electric actuators also require far fewer components than hydraulic systems. The diagram below from the same paper illustrates typical setups for each actuator type. While electric motors need more space at the force generation point, the overall system occupies much less space. Maintenance is also significantly reduced since electric motors don't require filters, oils, or other long-term consumables.
Operating Temperature
A major consideration for hydraulic systems is temperature management. Hot temperatures can degrade the hydraulic fluid’s quality, and cold temperatures can increase its viscosity which impacts repeatability of the system. Hydraulic fluid temperatures above 180°F (82°C) can damage most seal compounds and speed up oil degradation. While electric actuators have performance differences across temperatures, the operating window is much wider and can be deployed with extreme-temperature greases.
Accuracy & Precision
For all considerations listed above, the primary advantage is the flexibility of motion control capabilities in an electric actuator system—precise control over position, velocity, acceleration/deceleration profiles, output force, and complex control of all motion variables are all within reach. Electric actuator motion control is far beyond the capabilities of a hydraulic system.
Future | The Electric Atlas
When introducing the newest version of Atlas, Boston Dynamics was very intentional about calling the humanoid robot a product. Specifically, a product designed with an architecture in mind for use in factory settings (as well as lofty promises for use in our own lives). It’s clear the product requirements have shifted from the original DARPA challenge to one centered around commercialization efforts, where the benefits of a hydraulic based system don’t translate well.
Removing hydraulic actuators in their system de-risks system reliability and service maintenance. The use of electric actuators helps with increased power efficiency, reduces weight, and assembly complexity while sacrificing peak force & torque output. You don’t need robots performing parkour on a factory floor, as cool as that would be!

This wouldn’t be Boston Dynamics first time pivoting architectures as they have experience transitioning Spot from a hydraulic to electric actuator based system for commercialization. In an interview with CEO Robert Playter, he shares that launching Spot as a product required the whole company to take on new talent in manufacturing, service, and quality roles.
"A decade ago, we were one of the only companies putting real R&D effort into humanoid robots. Now the landscape in the robotics industry is very different." -Robert Playter
Research Links
- Characteristics of Hydraulic and Electric Servo Motors by Sayako Sakama, Yutaka Tanaka, and Akiya Kamimura
- Electric Rod Actuators vs. Hydraulic Cylinders: A Comparison by Tolomatic

